WATER-WALKING
Last updated:
08/16/2003

|
WATER-WALKING |
|










![]()


Statics
|
|
|
|
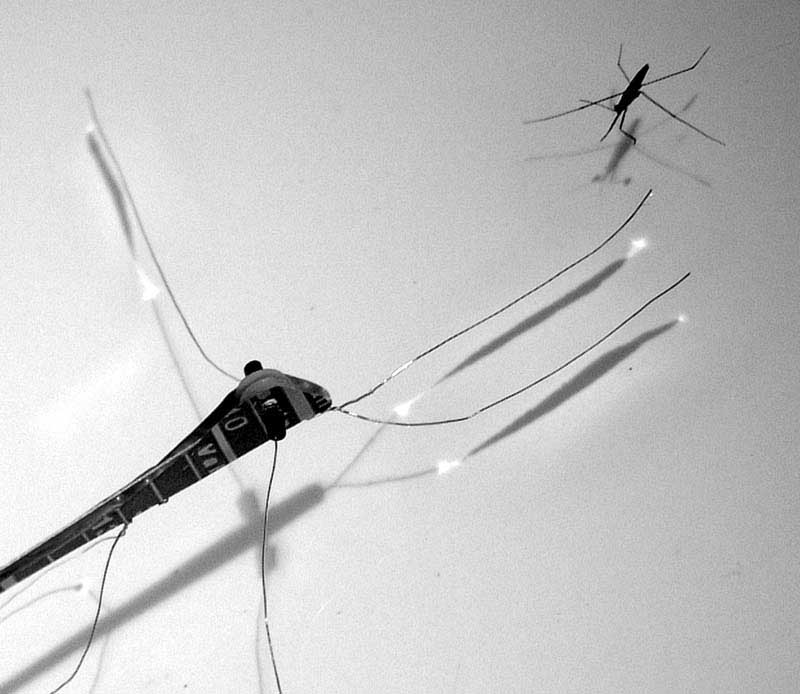
Figure 1. Top: Water strider examines another water walker. Water strider resting on duckweed. Water strider leaps onto lotus flower. Water striders are awkward on land and resort to leaping when pursued.
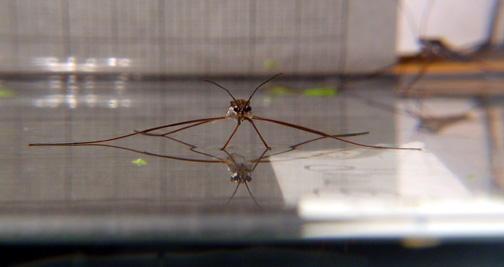
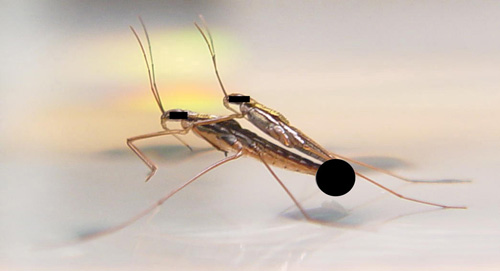
Figure 2. An adult water strider, gerris remigis. Body length is 1 cm. The water strider is supported by the curvature forces generated by their distorting the free surface. In a), one observes that the depth of the meniscus beneath each leg is near the leg diameter (~ 80 mm). In b), the front legs create a meniscus, with radius the capillary length Lc= (s/rg)1/2 ~ 4 mm in diameter. The border of the meniscus is marked by the refraction of the back legs.
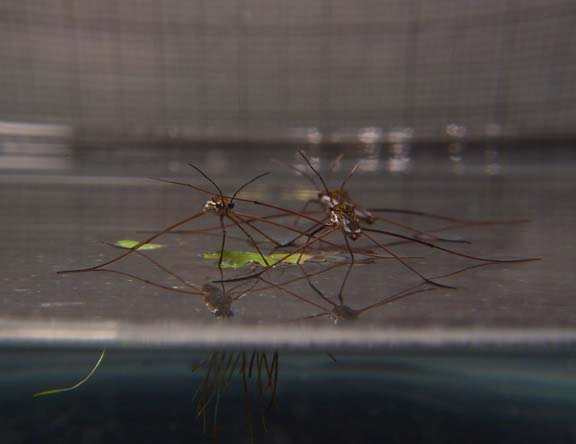
Figure 3. Two bucks facing off. Females, like the one to the right of the males, are 1.5 times the size of the males. Water striders play on the surface of the water, often leaping off the free surface to heights of four body lengths (see videos).
 |
|
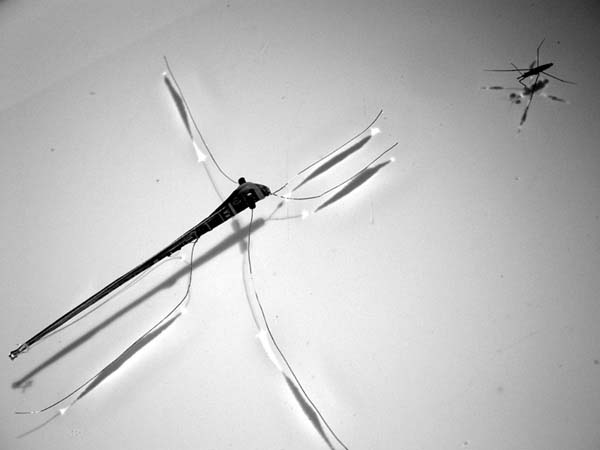
Figure 4. Water strider examines Robostrider. We have designed and constructed what we believe to be the first mechanical water walker. The challenge was constructing a device light enough to be supported by surface tension and able to apply a force per unit length less than the surface tension. Robostrider is powered by an elastic band that winds a pulley attached to its driving legs.
Figure 5. The water strider's legs are covered with thousands of hairs that render them effectively non-wetting. This property allows it to freely remove its legs from the surface to row. A water strider's weight is balanced by a surface tension force more than ten times its weight. This large margin of safety allows the strider to freely lift its legs from the surface during rowing or to support the weight of a companion without falling through the surface.
Figure 6. a) Coat hangers and b) Lobsterfest. In a) water striders in close proximity will often drift closer to one another due to attraction forces between two menisci. Water striders may communicate through surface capillary waves that they generate by slapping the water with their middle legs (Wilcox, 1979). The frequency of the waves allow them to distinguish the sex of the sender. In b) a dozen water striders feast on an MIT cockroach. Striders suck the juices from wetting insects that fall in the water and cannot dislodge themselves (e.g. roaches, flies). The non-wetting strider detects the surface waves made by its prey and quickly darts to its source.
Locomotion
|
Figure 1. The water strider is an insect of
characteristic length 1cm and weight 10 dynes that resides on the
surface of ponds, rivers, lakes
and the open ocean. Its weight is supported by the surface tension
force generated by
curvature of the free surface. Its body and legs are covered by
thousands of hairs
that render its legs effectively non-wetting (Andersen
1982). |
|
|
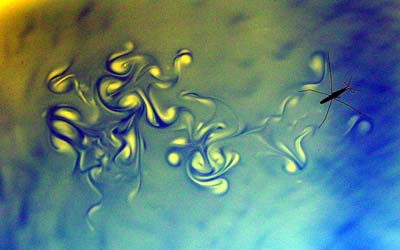
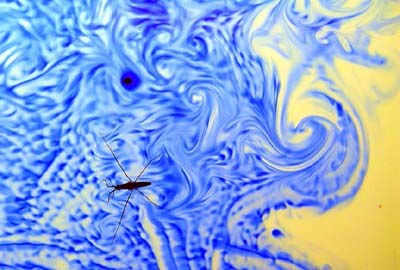
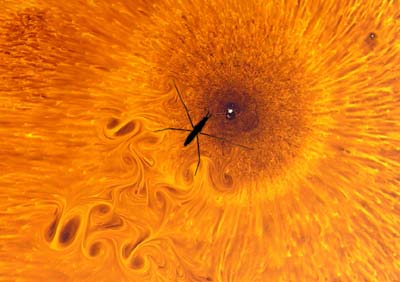
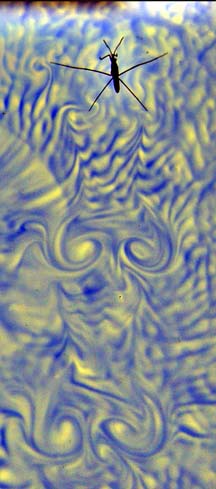
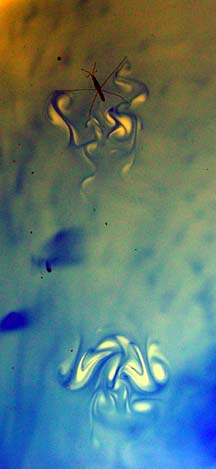
Figures 2 and 3. A water layer was sprinkled with Thymol Blue, which established the Marangoni convection responsible for the evident fine-scale texture. The layer was lit from below, giving the flow a natural luminescence. Stopping vortices shed during the deceleration phase of the strider's motion are evident in Figure 2. The dipolar vortices shed by the driving legs during each stroke are evident in Figure 3, and mark the path of the strider. The starburst in Figure 3 is associated with the relatively large particle of thymol blue evident at its centre: the Thymol Blue reduces the local surface tension, thus prompting surface divergence that clears the surface of blue dye. The water striders are light-seeking, and so drawn to the starbursts. |
|
|
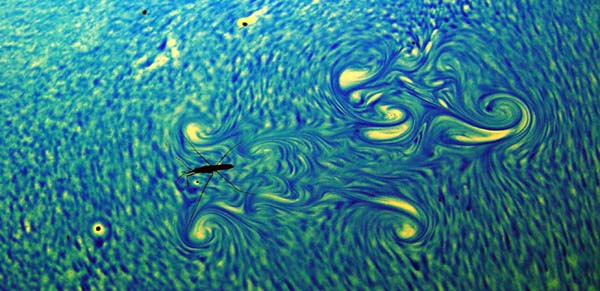
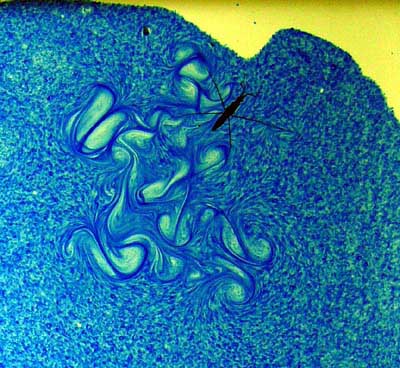
Figure 4. Dipolar vortices generated in the wake of the adult water strider. In a) the ambient texture results from Marangoni convection in the suspending fluid prompted by sprinkling thymol blue on the surface. The pH-sensitive dye changes color as the strider mixes the fluid in its wake. In b) a thin layer of thymol blue was established on the surface of the water by mixing the disturbed surface manually after a) was taken. The surface is erased momentarily before Marangoni cells begin forming.
Figure 5. a) The fiery eye and b) Ocean. The colors of thymol blue can be deepened by saturating the surface with thymol blue.
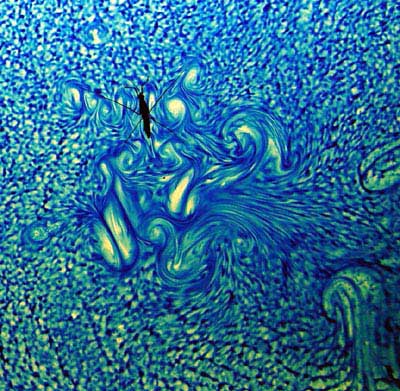
Figure 6. The strider can walk with taking smaller steps than its normal stroke by rowing with each leg sequentially. The deep blue color result from saturating the surface with thymol blue particles.
The two techniques

Figure 7. The two Thymol Blue techniques. a) was generated by sprinkling of thymol blue. b), c) and d) resulted from sprinkling then mixing of thymol blue. The infant water strider in c) is 1 mm in length. In d) the strider leaps five times its body length. Its landing is marked by stopping vortices along each leg. In b), the strider strokes several times allowing one to see the time evolution of the vortices in its wake. The ones in back are five times as old as the ones just forming in front.
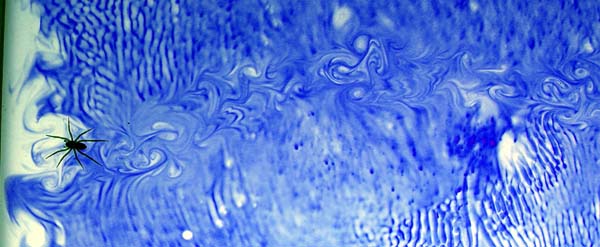
Figure 8. A freshwater spider Dolomedes running along the surface, leaving vortices behind its four pairs of stroking legs.
strider fans
(
http://www.digits.com/)
References
Andersen, N.M, 1982. The Semiaquatic Bugs.
Scandinavian Science Press,
Klapenborg, Denmark.
Denny, M.W., 1993. Air and Water: The Biology and Physics of
Life's Media,
Princeton University Press.
Suter, R. B., Rosenberg, O., Loeb, S., Wildman, H. and Long, J. H., Jr. (1979) Locomotion on the water surface: propulsive mechanisms of the fisher spider Dolomedes triton. J. Exp. Biol 200, 2523-2538.
Wilcox, R. S. & Stefano, J. D. (1991) Vibratory signals enhance mate-guarding in a water strider (Hemiptera: Gerridae). J. Ins. Behav. 4: 43-50.
Wilcox, R. S. (1979) Sex discrimination in Gerris remigis: role of a surface wave signal. Science 206: 1325-1327.
[Home