LIMBLESS
LOCOMOTION
Last
updated: June 2, 2009

|
LIMBLESS
LOCOMOTION |
|
All images and videos copyright of Grace Pryor, Mike Shelley and
David Hu, Applied Mathematics Laboratory at New York University and Dept. of Mechanical Engineering, Georgia Tech.


Figure 1. How do land animals move without
legs? Limbless animals tend to be long and slender, such as
the corn
snake shown above. One benefit this gives them is the ability to
hide in narrow spaces under branches and
leaves. To move along flat ground, snakes use a variety of
limbless "gaits" analogous to a horse's walk,
trot and
gallop. We study here the simplest of the snake's gaits,
slithering.

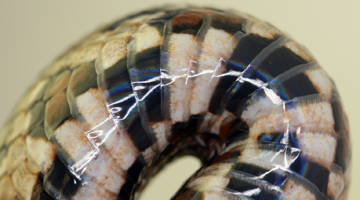

Figure 2. Have you ever run your hand over a cat's
fur? The fur feels smooth in one direction and rough in
another. Similarly, the bodies of snakes are covered by smooth
scales, resembling the overlapping shingles on a house. These
are
important to locomotion because they engage with
bumps on the ground while the snake is moving. Using simple friction
measurements, we find that arrangement of the scales causes the snakes
to slide twice as
easily forwards than sideways. This property is called frictional
anisotropy. Many everyday items share this property, like wheels,
ice skates and cross-country
skis. For example, wheels roll easily in the forward
direction, but skid in the sideways direction.
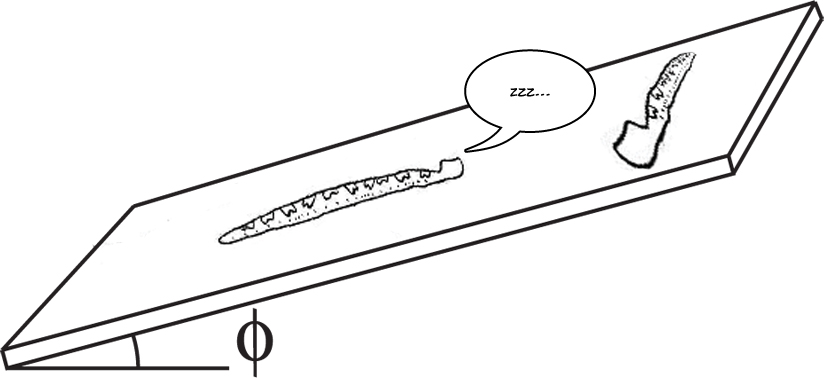
Figure 3. Methods: snakes on a plane. We temporarily put the snakes to sleep and slide them down inclined planes. By placing them in various orientations, we can measure their resistance to sliding. VIDEO: in the movie, we incline a plane with an awake snake. Notice that the ruler, because it is smooth, slides first. The snake's scales cause it to slide second.


Figure 4--VIDEOS. The
necessity of snake scales to locomotion can be shown by putting snakes
on smooth
surfaces or enveloping their scales in cloth. In both of these
cases, snakes are unable to slither forward. This is because their
scales cannot gain purchase in the ground.
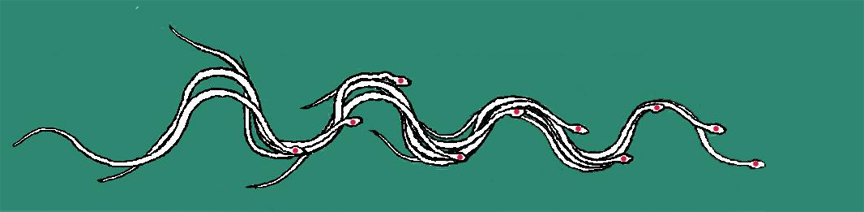
Figure 5--VIDEO.
Snakes can slither on flat ground if the roughness of the surface is
similar to that of the snake scales. The small bumps in the
ground allow the scales to catch when the snake is pushing
sideways. This may explain how snakes can be observed to cross
sand, bare rock, and roads.
Figure 6. Have you ever
tried running uphill? Snakes can also slither up a cloth-covered
hill, but not if it is very steep. Here, the limit is 7 degrees
of inclination. At higher
inclinations, they begin sliding backwards.
Figure 7. Using a
mathematical model incorporating the
frictional properties of the snake scales, we can account for about 70%
of
the snake's forward speed. The arrows in the video above indicate the
direction and magnitude
of the propulsive frictional force applied by the snake to the ground.
The red dot indicates the center of mass.
We found that a simple observation of the way snakes move could bring
the theoretical model into even closer agreement with our measurements.

Figure 8. Looking at the snakes from the side, we see that
they will often lift parts from the ground while slithering, as shown
in the video above. The snake's weight is then concentrated on
the remaining areas of contact. When we incorporated this
behavior into our theoretical model, we found increases in both body
speed and efficiency.




Figure 9. The ability of a snake to redistribute its
weight can also be seen using force
visualizations with a photoelastic gelatin. When polarized light
is shone through this material and viewed through cross-polarizing
film, forces applied by the snake become visible. Specifically,
bright regions indicate high force. While the snake undoubtedly
sticks to the gelatin as it tries to move across it, it is clear that
it
tends to lift the peaks and troughs of its body, as we observe in
normal slithering.
Figure 10. By adjusting our model to incorporate this dynamic
weight-balancing by the snake, we find improvements in speed of 35% and
in mechanical efficiency of 50%. This is illustrated in the video
above, where the body is colored red if the snake has lifted its body,
and blue if it has concentrating its weight on the ground. Why is
the lifted snake
faster? By pressing its weight in places where the friction force
is
greatest in the backwards direction, it can increase its
speed. This result shows that snake locomotion is similar
to the way we walk or run: we continually redistribute our weight from
the left to right foot as we move. Similarly, snakes are always
redistributing their weight so they can slither the fastest.
Figure 11. Other
investigators (Hirose, Choset, Miller) have built numerous snake robots
for search and rescue. Many of these robots rely on wheels to
slither over flat surfaces. The mechanisms of propulsion found in
this research, the use of overlapping scales and the use of
body-lifting, may find application in these devices.
snake fans
(
http://www.digits.com/)
References
1. M Walton, B C Jayne, and A F Bennett. The
energetic cost of limbless locomotion. Science, 249:524–527, 1990.
2. D Cundall. Functional morphology. In R A
Siegel, J T Collins, and S S Novak, editors, Snakes: Ecology and
Evolutionary Biology, pages 106–140. The Blackburn Press, 1987.
3. A Bellairs. Life of reptiles, volume 2, pages
283–331. Universe books, 1970.
4. J Gray. The mechanism of locomotion in snakes.
J. Exp. Biol., 23:101–120, 1946.
5. J Gray and H W Lissman. The kinetics of
locomotion of the grass-snake. J. Exp. Biol., 26:354–367, 1950.
6. Bruce C Jayne. Kinematics of terrestrial snake
locomotion. Copeia, 22(4):915–927, 1986.
7. C Gans. Slide-pushing: a transitional locomotor
method of elongate squamates. Symp. Zool. Soc. Lond., 52:12–26, 1984.
8. W Mosauer. On the locomotion of snakes.
Science, 76:583–585, 1932.
9. S Renous, E Hofling, and J P Gasc. Analysis of
the locomotion pattern of two microteiid lizards with reduced limbs,
Calyptommatus leiolepis and Nothobachia ablephara (Gymnophthalmidae).
Zool., 99:21–38, 1995.
10. S. Hirose. Biologically Inspired Robots:
Snake-Like Locomotors and Manipulators. Oxford University Press,
Oxford, 1993.
11. J Hazel, M Stone, M S Grace, and V V Tsukruk.
Nanoscale design of snake skin for reptation locomotions via friction
anisotropy. J. Biomech., 32:477–84, 1999.
[Home